Simpel is het devies
Plaats een reactieSamenspel arts en ingenieur maakt medische technologie gebruiksvriendelijk
In Delft werken ingenieurs aan nieuwe medische instrumenten. Elk nieuw product moet simpel en doeltreffend zijn. In elke stap van het ontwikkelproces wordt er samengewerkt met artsen. ‘Onze aanpak staat lijnrecht tegenover die in de robotica.’
De ruggenpriksimulator in het Biomedical Engineering laboratorium van de TU in Delft doet op het eerste gezicht wat primitief aan: een convexe metalen plaat met daarin een uitsparing voor een epiduraalnaald. Achter de plaat een eenvoudig schuifmechanisme. Op tafel staat een computerscherm met wel erg schematische ruggenwervels. Pas als je als leek vol goede moed je eerste epiduraalpunctie uitvoert, ervaar je het verfijnde mechaniek. Alle virtuele structuren hebben hun eigen weerstand. Het gele ligament, de laatste structuur voor de epiduraalruimte waar je moet zijn, biedt zoveel weerstand dat je zeker het ruggenmerg in schiet als je er voor de eerste keer met kracht doorheen prikt. Goed dat er geen patiënt voor je zit. ‘Het is ingewikkelder dan het eruit ziet’, licht dr. John van den Dobbelsteen, postdoc in het laboratorium, toe. ‘We hebben met MRI-scans gegevens verzameld over de botstructuren van patiënten van diverse leeftijden. De gegevens over de weerstand van huid en onderliggende structuren zijn afkomstig van stoffelijke overschotten.’ Het apparaat ziet er weliswaar wat simpel uit, ‘maar daar richten we ons ook op, simuleren met eenvoudige hulpmiddelen’.
‘Simpel maar doeltreffend is het devies aan de TU’, zegt ook prof. dr. Jenny Dankelman, hoofd van de afdeling Biomedical Engineering in Delft. Op haar afdeling werken 25 mensen, van wie 15 promovendi, aan het ontwikkelen van nieuwe technieken voor minimaal invasieve chirurgie. Ze werkt al sinds de jaren negentig aan deze technieken en wordt bijgestaan door prof. dr. ir. Kees Grimbergen, hoogleraar medische technologie aan het AMC.
Gebruiksvriendelijk
Bij dat adagium ‘simpel maar doeltreffend’ past ook het streven om technologie zo gebruiksvriendelijk mogelijk te ontwerpen. Jenny Dankelman: ‘Ik vind dat artsen geen genoegen zouden moeten nemen met de beperkingen die met veel nieuwe technologie gepaard gaan. Neem laparoscopisch opereren. Dat heeft veel voordelen. Maar er zijn ook nadelen: lange instrumenten, beperkte bewegingsvrijheid, misoriëntatie, slechte ergonomie. Je camera moet loodrecht op je instrumenten staan om goed beeld te hebben. Maar dan is je diepte-inzicht weg en de bewegingen van je instrumenten kloppen niet meer met je natuurlijke bewegingen. Dat willen wij verbeteren.’
Ze laat een voorbeeld zien: ‘De kleinste katheter ter wereld, in alle richtingen stuurbaar en ontwikkeld voor vasculaire interventies. Het materiaal is niets bijzonders, de constructie met een ring van kabeltjes wel. Onze afdeling heeft een prototype ontwikkeld, dat nu door een spin-offbedrijfje wordt getransformeerd tot een product dat geschikt is voor de markt.’
Het ultieme doel is
om op alle plekken in het lichaam te kunnen komen
De TU-technici laten zich bij de ontwikkeling van dergelijke instrumenten inspireren door de natuur. Zo hebben ze het stuurprincipe ontworpen naar analogie van zeer flexibele inktvistentakels. ‘Zo’n tentakel heeft over de lengte een ring van spiertjes en dat gegeven is vertaald in een ring van kabeltjes ingesloten tussen twee concentrische veren.’
Artsen zijn vanaf het begin bij het ontwikkelingsproces van dergelijke instrumenten betrokken. Reden waarom er altijd minimaal één promovendus met een klinische achtergrond op de afdeling is. Het TU-team gaat ook veelvuldig in gesprek met artsen en maakt regelmatig video-opnamen
van chirurgische teams in de ok.
In de pijplijn
Het ultieme doel is om op alle plekken in het lichaam te kunnen komen. ‘Om ter plekke een diagnose te kunnen stellen en een behandeling in te stellen’, zegt Grimbergen. Maar zover is het nog lang niet. ‘De kleinste holte in het lichaam is een capillair. Dat is het microgebied. Daar kunnen we nog helemaal niks. We zijn net het millimetergebied aan het oversteken.’
Maar er zit heel wat in de pijplijn. Dankelman: ‘We zijn nu bezig een stuurbare naald te ontwikkelen om biopten te verkrijgen. Zodat je kunt bijsturen als je naast een afwijking prikt. De volgende stap is het plaatsen van optische sensoren op de tip van zo’n naald. Een ander project is het langs minimaal invasieve weg vastzetten van een loslatende heupprothese met een stuurbaar instrumentje dat het fibreus weefsel rondom de prothese weghaalt en dan nieuw cement aanbrengt. En ten slotte vragen we ons al een tijdje af of de hele ok nog steriel moet zijn als je bij minimaal invasieve technieken alleen nog maar kleine incisies maakt. We denken aan een soort ballon die je om de trocars en om de operatie-instrumenten doet. Zo kun je ook zonder steriele omgeving opereren. Dat biedt grote mogelijkheden, vooral ook in landen waar lang niet in elk ziekenhuis state-of-the-art-ok’s beschikbaar zijn.’
Training
En dan zijn er nog de trainingsinstrumenten, zoals de ruggenpriksimulator. ‘Traditioneel wordt er meestal getraind op de patiënt’, zegt Dankelman. ‘Maar daar zijn we het niet zo mee eens.’ Opnieuw is simpelheid het credo, aldus Grimbergen. ‘De vraag is of het zinnig en doelmatig is met hele ingewikkelde programmatuur en geavanceerde installaties de werkelijkheid zo goed mogelijk na te bootsen. Beter is het eerst eens na te gaan wát er nu precies getraind moet worden. Dat zijn namelijk vooral de beperkingen van de laparoscopische techniek, zoals het beperkte gezichtsveld.’
‘Als iets lijkt alsof het echt is’, legt Dankelman uit, ‘willen je hersenen ook dat het echt voelt. Dat probleem is er niet als iets duidelijk een animatie is. Met de simulatoren die wij ontwikkelen, kun je taken uitvoeren die gericht zijn op het eenvoudig trainen van basisprincipes, zoals de ooghandcoördinatie. Het systeem evalueert wat je doet en geeft feedback. In sommige ziekenhuizen is al ingevoerd dat je bepaalde simulatiescores met zulke instrumenten moet behalen voor je de operatiekamer in mag.’ Het AMC maakt bijvoorbeeld gebruik van het door de TU Delft ontwikkelde Simendo (SIMulator for ENDOscopy), een educatief computerspel (‘serious gaming’) waarmee het hanteren van een endoscoop kan worden geoefend.
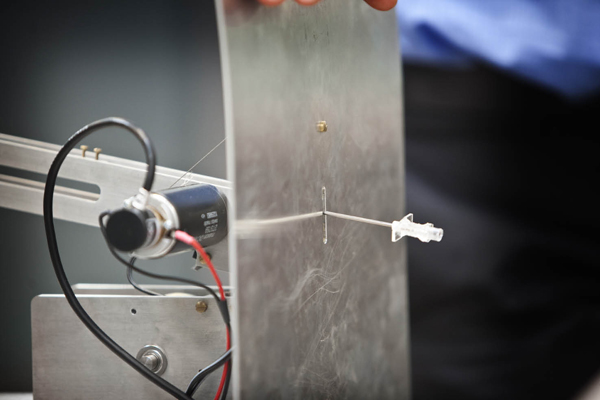
Maar de technici van de TU hebben ook oog voor op het eerste gezicht simpeler zaken. ‘We hebben onderzoek gedaan naar hechten’, zegt Grimbergen. ‘Daarvan dacht ik altijd dat het een universele techniek was in de geneeskunde. Vergeet het maar: alle afdelingen in het ziekenhuis hechten op hun eigen wijze. Daar zijn soms hele goede redenen voor, maar soms ook niet. Probleem is: artsen kijken niet genoeg naar elkaar. We hebben een apparaatje bedacht waarmee je hechten kunt trainen. Het meet de krachten die je op het weefsel uitoefent met een ‘krachtplatform’, en geeft daarover feedback. Belangrijk, want zo leer je zo te hechten dat je het weefsel niet inscheurt.’
Gehypte robotica
Dankelman, Grimbergen en hun medewerkers weten hoe het toegaat op de ok, en precies dat is de reden waarom ze weinig zien in de volgens hen nogal gehypte robotica. ‘Processen op de operatiekamer zijn al zo complex, daar moet je niet nog eens een robotsysteem tussen zetten dat de operateur moet aansturen’, zegt Dankelman. ‘Bovendien werkt een robotsysteem als de Da Vinci niet beter dan gewone laparoscopie. En niemand heeft het over de nadelen van robotchirurgie.’
Grimbergen somt ze op: ‘De onderhoudskosten van het apparaat zijn 100.000 euro per jaar. De chirurg werkt in een virtuele wereld. Hij kijkt alleen nog maar naar dat deel van de patiënt dat hij in beeld heeft. Hij voelt niks meer, dus ook niet hoe hard hij aan het weefsel trekt. Dus moeten chirurgen nieuwe cues leren om daarmee om te gaan. Ze moeten de posities van de insteekopeningen heel nauwkeurig bepalen, anders kunnen de armen van de robots elkaar raken, hetgeen tot gevaarlijke situaties kan leiden. Je moet bovendien alles afdekken, want een robot is niet steriel. Het is leuke technologie hoor, maar er zit weinig potentieel in. De afgelopen vijf jaar zijn de enige veranderingen binnen de robotchirurgie dat we van gewoon videobeeld naar high definition zijn gegaan, en van drie naar vier armen. Als je al die bezwaren voorlegt aan chirurgen, zijn ze het er vaak mee eens. Maar ja, dat zeggen ze liever niet in het openbaar, want ze hebben net gelobbyd voor dat apparaat van anderhalf miljoen.
Onze aanpak staat lijnrecht tegenover die in de robotica. Aan het begin van een ontwikkelproces kijken we met experts wat we precies willen bereiken en wat de functionaliteit van een product moet zijn. In de robotica gaat het andersom: je moet eerst een miljoen op tafel leggen en dan kun je verder. Het is duur, het is nieuwe technologie en opeens wil iedereen het hebben.’
Hier wreekt zich ook het feit dat bij de introductie van nieuwe technologie, zoals robotica, vaak beperkt zicht bestaat op wat de nieuwe apparatuur oplevert voor de patiënt, meent Grimbergen. ‘Geneesmiddelen worden jaren getest op werking en bijwerkingen en via een lange weg uiteindelijk vrijgeven voor de markt. Medische apparaten en instrumenten, mits op de juiste manier geproduceerd kunnen “zomaar” op patiënten worden toegepast. Het is dan lang niet altijd duidelijk of de gebruiker er veilig mee kan werken en hoe de nieuwe techniek ingrijpt in het protocol van de diagnosebepaling of behandeling. Dat mag de arts zelf in de praktijk uitvinden. Dit leidt dan ook tot van werkplek tot werkplek verschillende inzet van apparatuur en instrumenten.’ Dat is niet van gevaar ontbloot, weet ook Dankelman. ‘Artsen zien incidenten bij de introductie van nieuwe apparatuur nog te veel als inherent aan het gebruik ervan.’
Samenspel
Volgens Grimbergen moeten arts en technicus daarom samen nagaan hoe en wanneer nieuwe techniek wordt ingevoerd en welke eisen die stelt aan onderzoekskamer of operatiekamer. ‘Het moet een samenspel zijn van een arts, die het belang van de patiënt bewaakt, en de technicus die zich verdiept in de techniek, de eisen en beperkingen ervan. Daar hoort ook bij dat de technicus aanwezig is bij de eerste serie procedures met de nieuwe techniek, omdat dan in onderling overleg beslist kan worden over de gewenste toepassing.’
Bij de TU in Delft streven ze er daarom naar samen met het AMC nieuwe technologie eerste uit te proberen in pilotprojecten en ze pas daarna ‘in de markt te zetten’.
‘Met de kloof tussen arts en technicus
moet je leren leven’
Jenny Dankelman, Kees Grimbergen en hun team willen samenwerken met artsen; ze zijn zelf geen arts. En dat moeten ze ook helemaal niet willen worden, vinden ze zelf. Dankelman: ‘Het probleem met sommige medisch-technische opleidingen is dat ze proberen een beroepsgroep te vormen die half arts en half ingenieur is. Ik denk dat dat niet verenigbaar is in één persoon. Je moet respect hebben voor de verschillen in manier van werken en denken. Met die kloof moet je leren leven. Als je studenten aan een TU opleidt met fysiologie en anatomie in het pakket, zoals medisch studenten dat ook krijgen, dan krijg je studenten die denken dat ze wel weten hoe het zit. En dat is nou net wat je niet wilt: studenten moeten juist artsen uitvragen en met ze in discussie gaan over problemen en mogelijke technische oplossingen.’
Grimbergen is het daar volmondig mee eens. ‘Als je van iemand een goede ingenieur én een goede arts probeert te maken, verlies je soms alles. Er zijn goede eigenschappen van een arts die voor een technicus geen goede eigenschappen zijn. Er is een fundamenteel verschil in denkproces tussen een ingenieur en een arts. Artsen zijn getraind om met onzekerheden om te gaan: elke patiënt is anders en de tijd is beperkt. Voor een ingenieur is tijd meestal niet zo’n probleem, maar onzekerheden wil hij niet. Ik geef toe: dat geeft soms wrijving. En je hebt steeds een lange adem nodig.’
Henk Maassen
Sarah Sloot
De website van de vakgroep van de TU is: www.misit.nl.




- Er zijn nog geen reacties